2.1总体研究成果
该方向的主要研究成果集中在高精度的定位算法研究,高精度GNSS车辆监测系统的构建,以及基于北斗通讯的海洋渔船监测系统构建等三个方面。针对GNSS系统定位的脆弱性等问题,实验室开展了抗差自适应动态定位技术、广域网解PPP技术、以及模糊度固定技术的研究。最终将这些研究技术应用到高精度GNSS车辆和渔船监测系统的构建中,从而形成以创新技术支撑系统建设的良性循环。在该方向上承担了1项国家重点研发计划子课题,2项国家自然科学基金课题,1项山东省自然科学基金和2项国家重点实验室开放基金。
2.2重点研究成果
(a)高精度定位算法研究
主要成果包括:①研究了抗差自适应动态定位技术。该方法利用抗差原理抵制动态定位中异常观测值的影响,同时用自适应滤波调节了状态扰动对定位结果的影响;②针对海上参考站较少,提出利用广域网解PPP技术估计卫星和接收机钟差的方法,有效利用了稀疏分布的参考站来提高了高动态情况下的定位精度,且高频采样数据(1s)的计算结果精度明显要优于传统PPP中采取的插值IGS钟差的方法;③动态定位条件下的信号失锁比静态更加容易发生,周跳更加频繁,因此很有必要应用模糊度固定技术来加快解的拟合,从而减弱高动态情况下的结果由于重新初始化而造成的扰动。利用本实验室已建成的GNSS车辆监测系统,结合这三点先进性进行了车载和船载动态定位实验。由于车载或船载上安装的若干天线是固定的,它们之间的天线参考点的距离可以作为评定定位结果精度的依据。
研究测试结果:首先是船载动态定位试验结果。下图中(a-e)分别是经典常速度模型的Kalman滤波、抗差Kalman滤波、基于当前统计模型(CS)的抗差Kalman滤波、基于改进CS模型的抗差Kalman滤波、基于改进CS模型的抗差自适应Kalman滤波。可以看出抗差能有效抵制粗差的影响;对于状态方程,当前统计模型由于常速度模型,自适应滤波能有效调节状态扰动的影响,最后抗差自适应滤波结果最优。

图10 船测试验GNSS天线安装位置
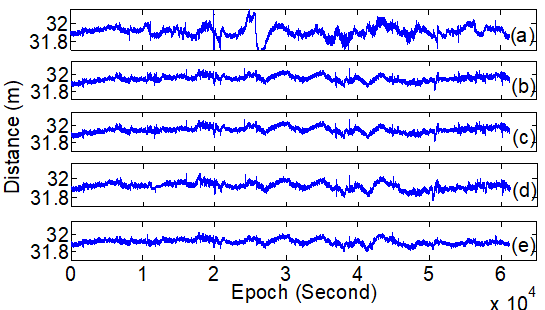
图11不同方案的天线间距离解算结果
其次是车载实验结果,分别采用了双差、PPP和网解PPP(即POP)技术,以及模糊度浮点(float)和固定解(fixed)。为了能更好的看出各个解之间的差异,双差、PPP浮点、PPP固定、POP浮点解分别增大了0.2,0.4,0.6和0.8 m。从图中可以看出,长距离双差解并不可靠,随着基线长度的增加,一些共性误差并不能通过双差技术消除将会显著降低解的精度。PPP和POP的模糊度固定解要优于浮点解,且POP的固定解精度最高。从这可以看出在动态定位中,模糊度固定技术能够加速解的重新拟合,从而减小解的状态扰动。
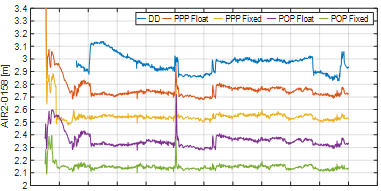
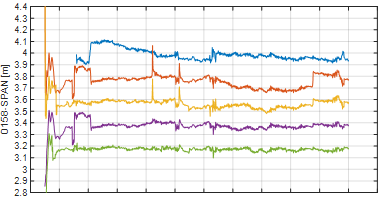
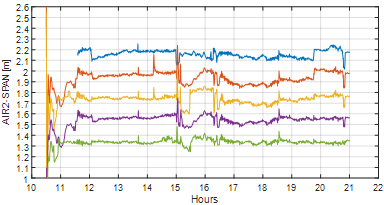
图12车载三个天线之间两两组合的距离结果对比
(b)高精度GNSS车辆监测系统建设
高精度GNSS车辆监测系统主要思路是在系统建设与当今先进的通信、大数据分析、计算机网络发展技术相适应,符合总体规划和长远发展的需要,充分保证系统的可伸缩性和可扩展性,保证系统的先进性、开放性、高可靠性、实用性、成熟性的有机结合。
该系统的主要建设内容包括以下部分:数据采集部分、数据传输部分、数据接收和中转部分、数据解算部分以及成果展示部分。数据采集部分主要是通过BDS/GNSS接收机接收数据;数据传输部分通过4G/3G/2G等无线通信网络将采集得到的数据传回数据中转服务器;数据接收和中转部分有数据中转服务器完成,它具备接收实时数据流的功能并且也具备数据转发的功能;数据解算部分是由装有数据解算软件的服务器完成;成果展示部分是要在不同的显示终端以一种简单易读的方式展示给用户。
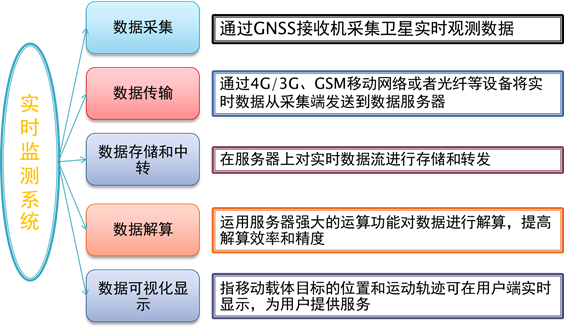
图13 GNSS实时监测系统构造
研究成果主要体现在建立了一套车辆实时监测系统,整个系统的示意图如下图所示:
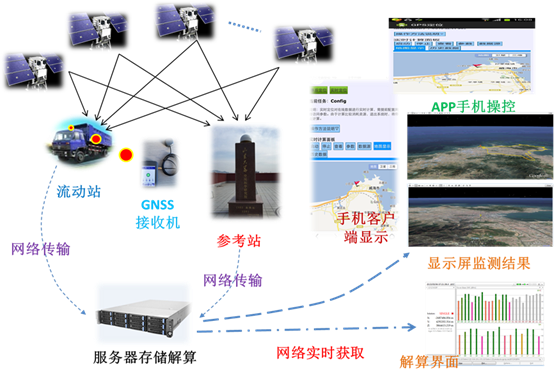


图14 GNSS实时监测系统示意图和车载实验现场照片
(c)基于北斗通信的海洋渔船监测系统建设
我国是渔业大国,海域辽阔,海岸线长达1.8万公里,海洋渔业水域面积达300多万平方公里。目前,从事渔业人口超过2000万,共有各类渔船106万艘,其中机动渔船达67万艘,海洋捕捞渔船超过20万艘,2011年,全国渔业经济总产值超过1.2万亿,2021年,预计达到3万亿元规模。另外,威海市作为渔业强市,渔船出海作业的安全问题一直是全社会重点关注的问题。为了保障渔船的出海安全,巩固和发展了渔业生产,推动了“平安渔业”建设,建立北斗定位通讯集成的一体化渔船监测系统具有很强的社会和经济效益。
该系统主要研究成果体现在:
a.高精度定位模块设计
主要基于GNSS定位设备,改善进行动态/静态精密定位算法,研究BDS与GPS的差异,GPS和BDS的时空基准转换与统一问题,分析BDS与GPS载波、伪距动态定位的异同点,开发更高精度的BDS/GPS组合导航定位算法及定位板卡及芯片,解决现阶段北斗定位精度差的问题,使保证系统整体技术达标,功能实现的关键。
b.通讯技术优化设计
北斗短报文是我国北斗卫星导航定位系统的特色功能,是有区别于世界上其他几大导航定位系统。北斗的双向通信功能就是指用户与用户、用户与中心控制系统间可实现双向简短数字报文通信,任何拥有终端设备的用户可免费获得此服务。此部分主要基于北斗通讯功能,对通讯技术及方式进行升级,对全方位天线进行改造,提高实时接收能力,解决当前情况下部分朝向无法通讯的现状。
c.软件展示系统优化设计
对现有船只监测系统展示端进行优化,设计完备的后台数据处理系统及数据分析系统,一方面对界面布局进行合理调整,使之满足管理部门及客户要求,另一方面,对接收到的各个终端设备数据进行分析,使之具有智能处理突发情况、合理分析运行情况说明的能力,体现智慧海洋特点。
最终建立一整套从通信、定位、到最终展示的北斗通信定位一体化的海洋渔船监测系统,整体构造图如下图所示:
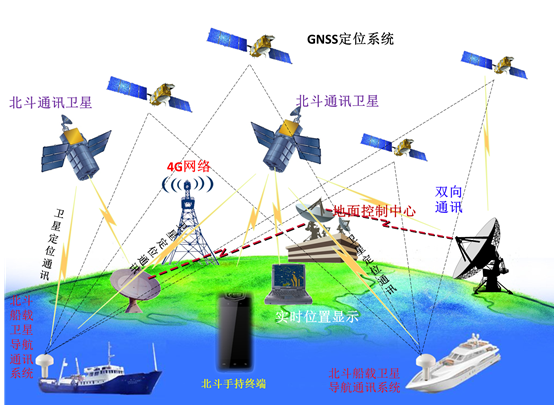
图15 通信定位一体化海洋渔船监测系统
该套系统我们已经在威海市海域进行了相关测试,证实已经具备商用的价值。

图16威海市皂埠码头现场测试情况及定位展示


图17威海市袁瑶码头安装情况及远洋出海定位展示
相信不久的将来该套系统可以率先在威海市辖区内提供高精度的船只实时监测服务应用,这样不仅可以大幅提高威海市船只管理的能力,还可以迅速将北斗定位、导航及监测服务更好地推向市场,服务大众用户,带来巨大的经济和社会效益。